学科: 船舶与海洋工程
船舶与海洋工程是研究船舶与海洋结构物设计、建造、运营及维护的综合性工程学科,涵盖流体力学、结构力学、材料科学、船舶动力学、海洋环境工程等领域。其核心任务包括船舶与海洋平台的设计优化、推进系统研发、海洋资源开发技术、深海探测装备研制及海上安全环保技术开发,服务于航运、海洋能源、国防安全等关键行业,推动海洋强国战略实施。(该学科下共有 4 篇文章)
可变形软体机器鱼的灵活多模式游泳方式
作者: aeks | 发布时间: 2026-01-18 17:41
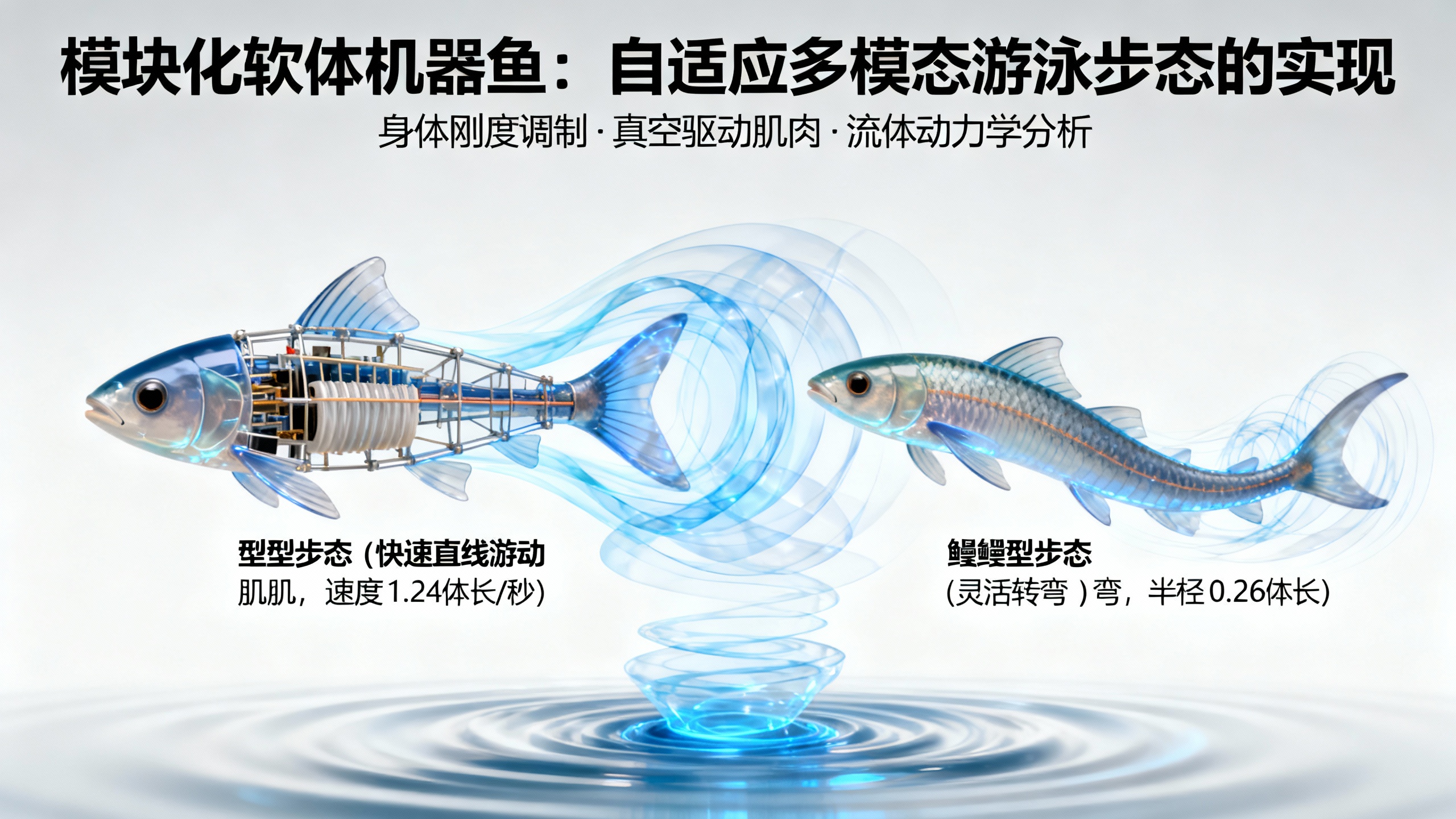
鱼类有四种主要游泳步态,本文研发的可重构模块化软体机器鱼通过快速调节身体刚度,能在单个平台上复现所有四种步态。真空驱动肌肉实现快速刚度调制,鲔型步态速度达1.24体长/秒,鳗型步态转弯半径仅0.26体长,流体模拟显示鲔型产生更强涡流和推力,机器人可动态切换步态适应环境。