光控微型机器人集群运动
作者: aeks | 发布时间: 2026-05-31 00:02 | 更新时间: 2026-05-31 00:02
光控微型机器人集群运动
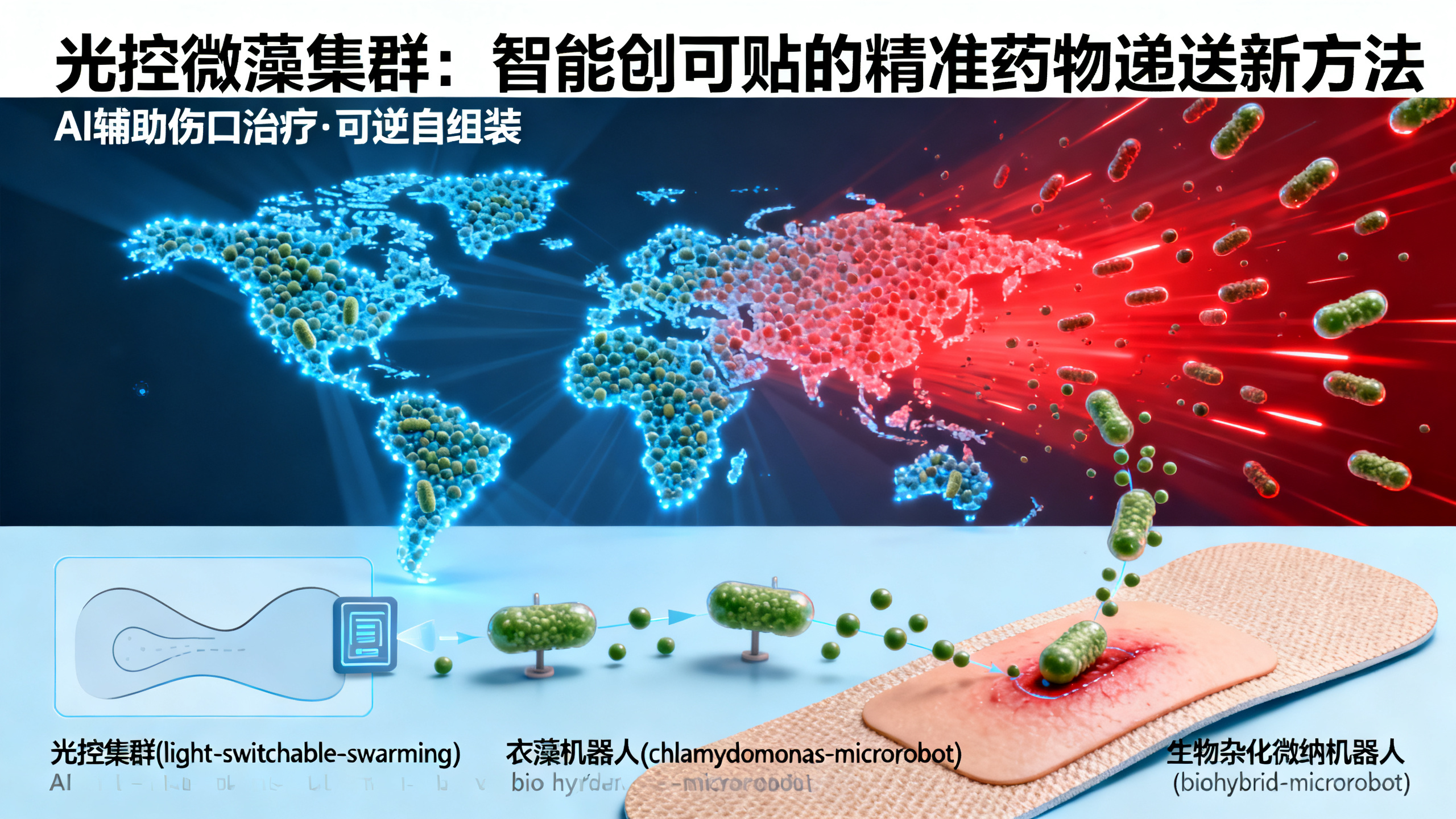
本文报道了一种基于衣藻(Chlamydomonas reinhardtii,简称CR)的生物杂化微型机器人集群光控技术。研究团队发现,这种单细胞绿藻具有独特的光响应特性:在蓝光照射下,它会表现出负趋光性(向光面反方向游动),同时其鞭毛能可逆地粘附在液-气界面,促使个体相互聚集形成稳定集群;而在红光照射下,藻体恢复自由游动状态,集群随即解体。通过在显微镜光路中引入定制化镂空掩模(mask)并切换蓝/红光波长,研究人员能精确控制集群的形状、大小和位置——例如,先用美洲轮廓掩模+蓝光生成美洲形状集群,再用红光解散,接着换用亚欧非轮廓掩模+蓝光,快速重构新集群。该过程高度可逆,在多次循环中仍保持>95%的形状保真度(Dice系数)。进一步实验表明,集群可在微米到毫米尺度灵活构建;还能实时平移、分裂(如菱形→两个三角形)、融合(两个三角形→菱形),甚至动态缩放尺寸。为解释机制,作者建立了概率模型:藻体运动具随机性,而是否加入或离开集群,取决于当前光照状态(蓝光促进聚集、红光促进离散)。最后,研究将该技术拓展至医疗应用:先用AI图像分割算法分析真实伤口照片,自动生成匹配伤口轮廓的掩模;再将载药的PLGA-衣藻杂化机器人印在医用胶带上,蓝光“打印”集群,红光“释放”至伤口表面——2分钟内约90%机器人即可精准送达。整个系统无需外部磁场或声场,仅靠安全可见光驱动,操作简便、生物相容性好。局限在于光穿透深度有限,目前适用于体表伤口等浅层场景,但为未来智能靶向给药、环境修复等提供了全新思路。