可变形软体机器鱼的灵活多模式游泳方式
作者: aeks | 发布时间: 2026-01-18 17:41 | 更新时间: 2026-01-18 17:41
鱼类依靠身体/尾鳍(BCF)的波动运动展现出极强的游泳适应性,能通过调动身体不同部位产生四种经典游泳步态:鳗型(身体80%以上波动)、亚鲹型(50-70%波动)、鲹型(后1/3波动)和鲔型(仅尾柄<20%波动),速度从鳗型的<3体长/秒到鲔型的最高20体长/秒递增。然而,此前研究对肌肉激活长度如何影响游泳性能的理解不足,且现有机器鱼多局限于单一步态,难以系统比较不同模式。
为此,研究团队研发了一种多模态软体机器鱼,它结合张拉整体结构的原位重构能力和层 jam 技术的快速刚度调制,通过四个连续关节的选择性锁定,可复现上述四种步态。该机器鱼由刚性头部(含控制电子元件)、可重构张拉整体中体和柔性尾鳍组成,每个关节含四个仿生 jam 层肌肉(BJLM),通过真空驱动实现刚度快速调节(切换时间≤1秒,刚度比46.6)。
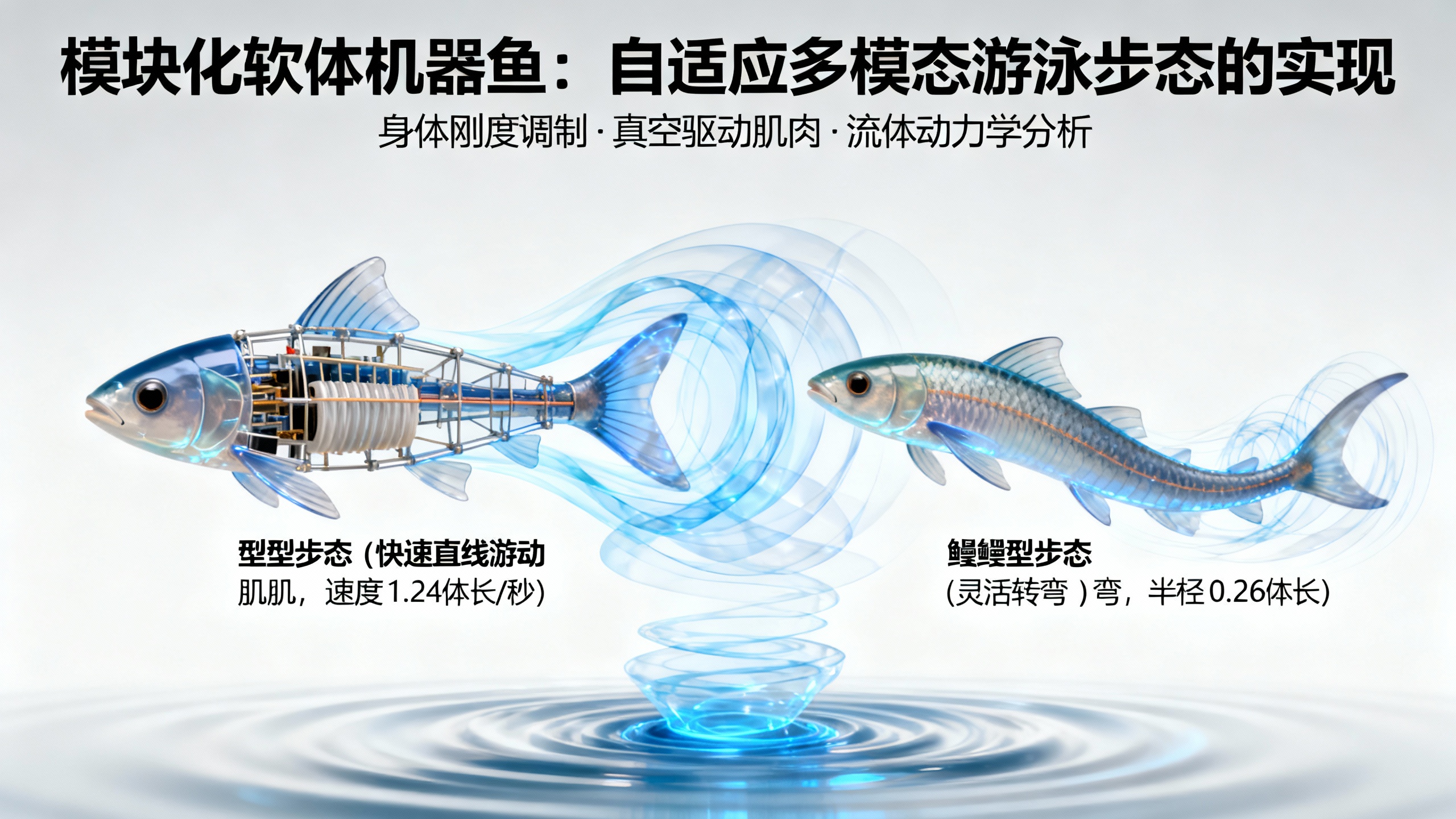
性能测试显示:鲔型步态下,机器人速度达1.24体长/秒;鳗型步态下,转弯半径仅0.26体长。流体动力学模拟表明,5Hz时鲔型步态产生的涡流更强,推力比鳗型高142%,解释了其高速性能。能耗方面,鲔型步态在5Hz时运输成本(CoT)最低,比鳗型低约45%,推进效率达67.91%。
动态适应实验中,机器鱼能在运动中无缝切换步态:高速巡航时用鲔型,遇到障碍物切换为鳗型。在受限环境测试中,它可在U型通道(宽60cm,小于自身65cm体长)中切换至鳗型完成U型转弯,而固定鲔型模式则会被困。野外试验也验证了其通过切换步态穿越狭窄岩缝的能力。
该研究不仅实现了单一平台上四种鱼类步态的复现,还为理解水生多模态运动提供了物理模型,有望应用于复杂水域任务如礁区监测、冰下探测等。