微型磁控机器人系统:轻松应对复杂管道,精准送入支架
作者: aeks | 发布时间: 2025-10-23 17:59 | 更新时间: 2025-10-23 17:59
学科分类: 临床医学 控制科学与工程 生物医学工程 电子科学与技术
微型磁控机器人系统:轻松应对复杂管道,精准送入支架
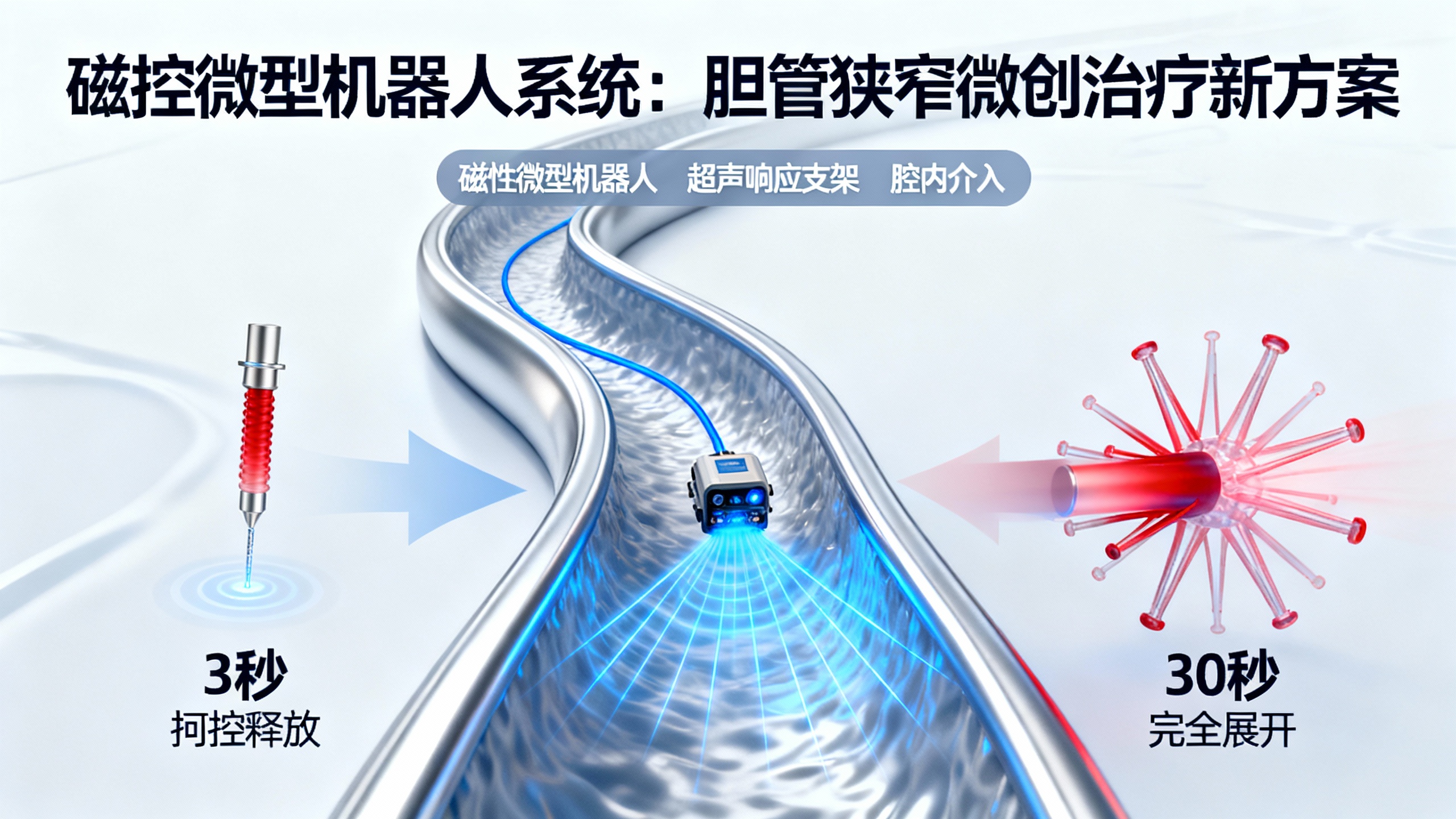
腔内支架植入是治疗梗阻性病变的常见介入手段,但传统输送系统难以到达深部、弯曲的管道。为克服这一局限,研究团队研发了一种磁控微型机器人系统,该系统集成了两个功能模块:用于灵活导航的磁驱动(MA)模块和用于病变特异性扩张的超声响应自膨胀支架模块(ST模块)。该系统采用由旋转方向控制的动态可调组装机制,顺时针旋转时实现整体移动,逆时针旋转时可在狭窄部位按需分离模块。该平台兼容术中超声,可在生理环境中实现实时导航和热触发扩张。通过协同可编程磁驱动、超声介导扩张和临床工作流兼容性,该机器人能够在弯曲的模拟管道中导航,3秒内完成支架的可控释放,30秒内实现完全扩张,可用于胆管狭窄的微创治疗。这项研究通过克服腔内介入临床转化的关键障碍,推动了微型机器人支架输送技术的发展。