学科: 机械工程
机械工程是研究机械系统设计、制造、运行与维护的学科,涵盖力学、材料、热力学、流体力学等领域,应用数学与物理原理解决实际工程问题。其分支包括机械设计、自动化、机器人、车辆工程、航空航天等,强调创新、效率与可靠性,广泛应用于工业生产、交通运输、能源开发等行业,推动现代工程技术进步与智能化发展。(该学科下共有 202 篇文章)

用纳米材料3D打印电子器件:借助类似超材料的近场电磁结构
作者: aeks | 发布时间: 2026-02-14 18:03
学科: 机械工程 材料科学与工程 电子科学与技术 纳米科学与工程
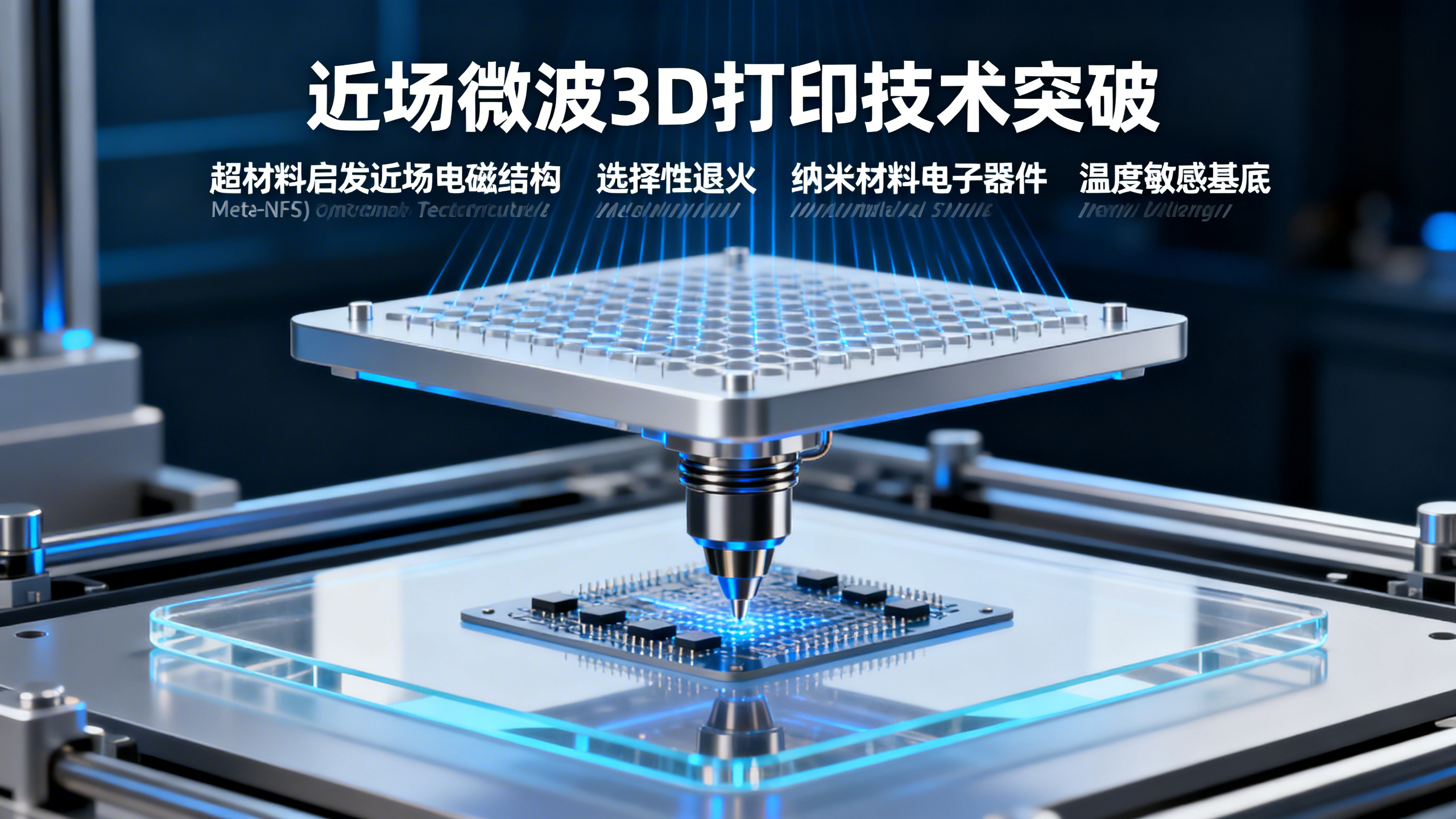
3D打印可制造多样自由形态的结构和电子器件,但选择性退火难题限制其潜力,尤其在温度敏感基底上。本研究用超材料启发的近场电磁结构(Meta-NFS)聚焦微波,实现3D打印纳米材料的高选择性快速体加热,能在不透明材料中局部编程性能,拓宽材料范围,助力制造新型电子器件。

不到一秒打印出立体物体:利用全息光场技术
作者: aeks | 发布时间: 2026-02-12 09:03
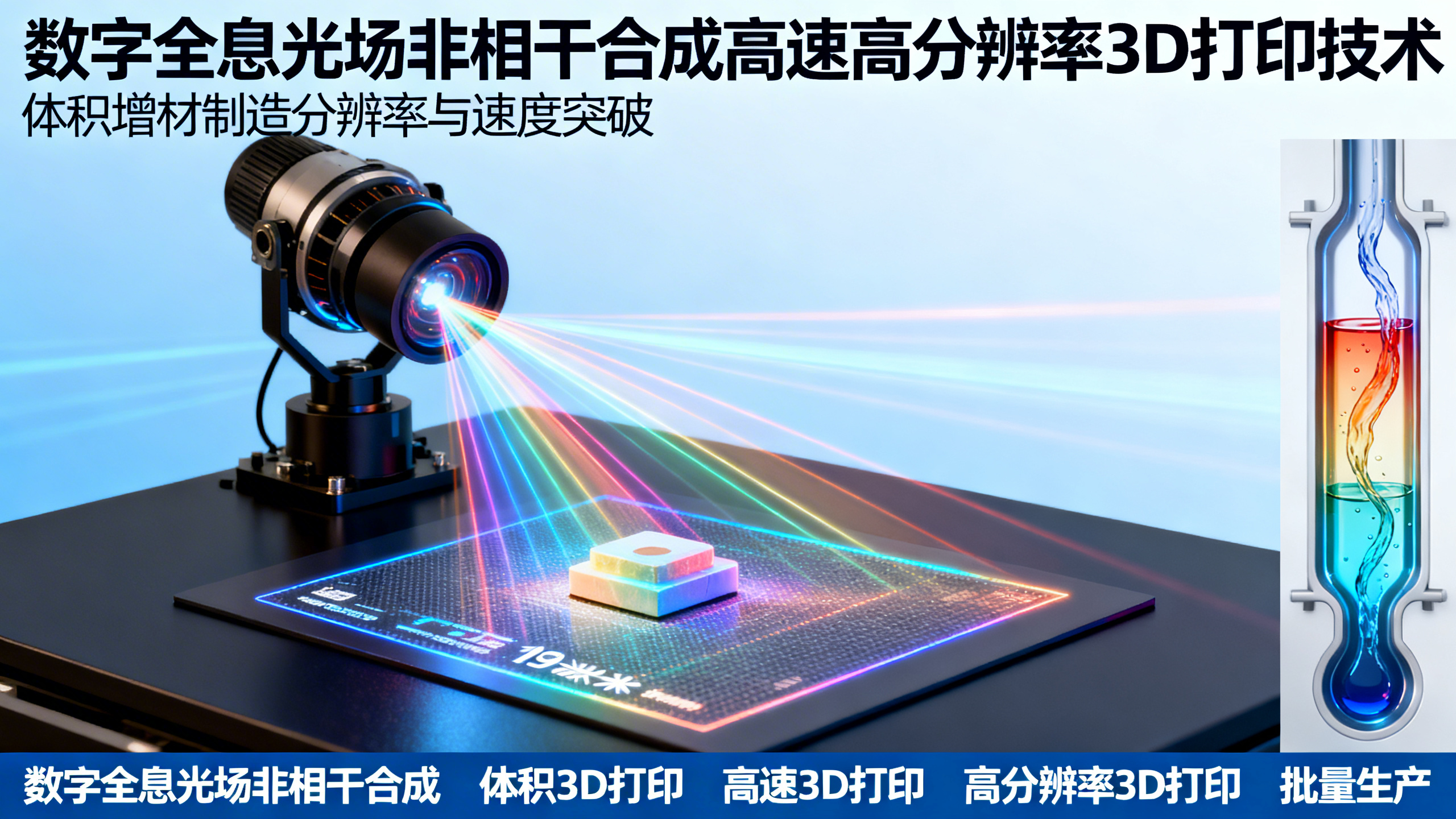
体积增材制造虽能灵活生产复杂结构,但现有方法存在分辨率与构建速度的权衡问题。本文提出数字全息光场非相干合成(DISH)技术,通过高速旋转潜望镜实现多角度连续投影,无需样品旋转,在1厘米范围内保持19微米打印分辨率,0.6秒内完成毫米级物体的高分辨率原位3D打印,兼容多种粘度材料,结合流体通道可批量生产复杂结构,应用前景广阔。


