学科: 控制科学与工程
控制科学与工程是研究系统建模、分析、控制与优化的综合性学科,涵盖自动控制理论、智能控制、系统工程、机器人技术、工业自动化等领域。它以数学、计算机和电子技术为基础,致力于解决复杂系统的稳定性、鲁棒性、自适应性等问题,广泛应用于航空航天、智能制造、能源管理、交通系统等国民经济关键领域,是现代工程技术的重要支撑学科。(该学科下共有 316 篇文章)
一种受大脑神经突触启发的通用软体机器人控制器
作者: aeks | 发布时间: 2026-01-18 20:01
学科: 控制科学与工程 机械工程 生物医学工程 计算机科学与技术
受神经元启发的软机器人控制器,通过离线“结构突触”和在线“可塑性突触”,能适应不同软臂、任务及干扰,轨迹跟踪误差降低44-55%,形状精度保持92%以上。
标签: 收缩度量 神经元启发软机器人控制器 突触可塑性 自适应控制 软机器人控制
可变形软体机器鱼的灵活多模式游泳方式
作者: aeks | 发布时间: 2026-01-18 17:41
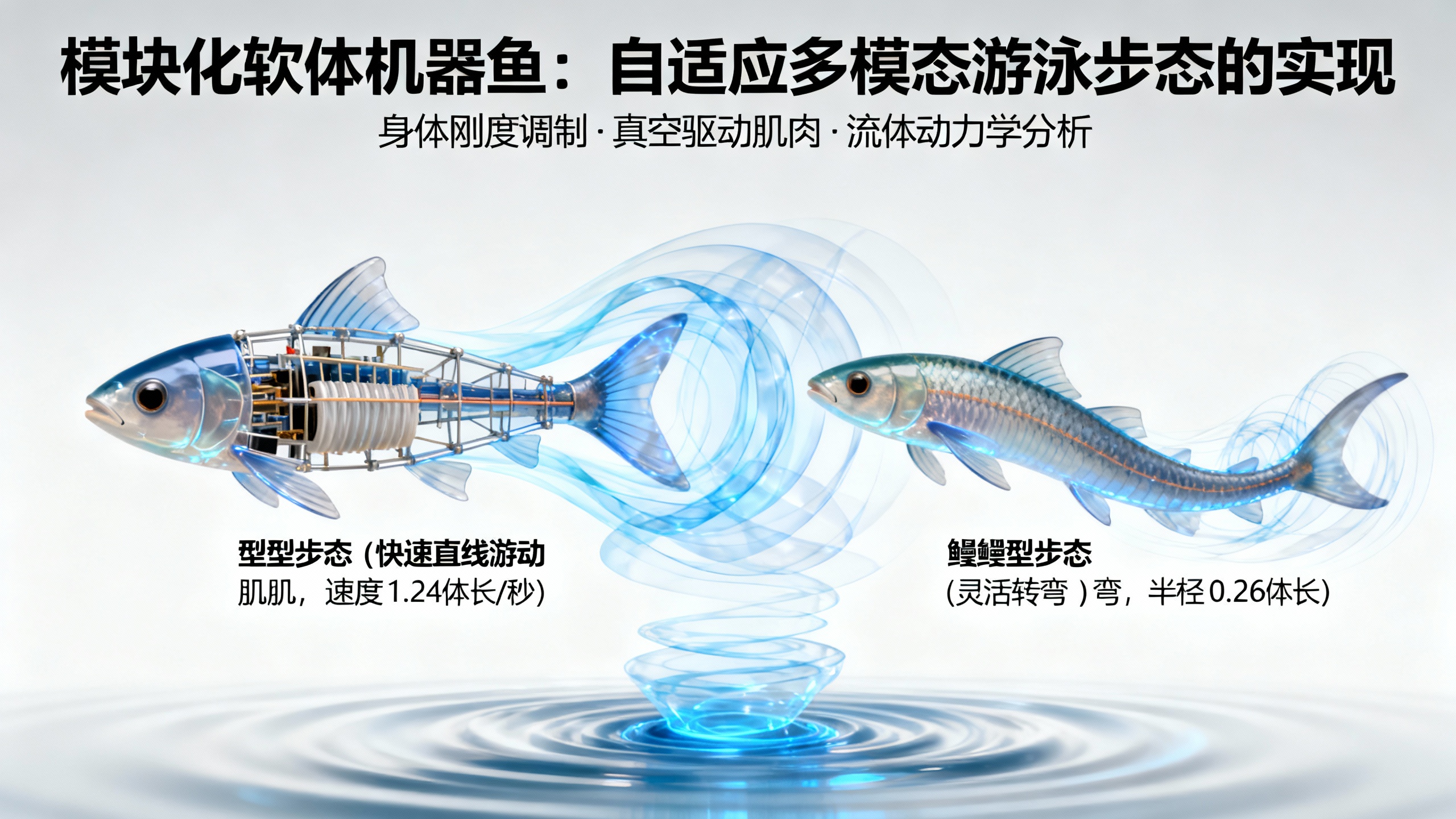
鱼类有四种主要游泳步态,本文研发的可重构模块化软体机器鱼通过快速调节身体刚度,能在单个平台上复现所有四种步态。真空驱动肌肉实现快速刚度调制,鲔型步态速度达1.24体长/秒,鳗型步态转弯半径仅0.26体长,流体模拟显示鲔型产生更强涡流和推力,机器人可动态切换步态适应环境。

仿生多功能爬墙机器人:轻松应对不同表面
作者: aeks | 发布时间: 2026-01-16 04:02
受壁虎和章鱼启发的跨介质爬壁机器人,采用刚柔混合履带和空心蘑菇状黏附微结构,在干燥和水下环境均具强黏附力与接触适应性,能适应多种材料表面,推动其广泛应用。