标签: 软体机器人
该标签下共有 8 篇文章

在水面上“打印”机器人?UVA黑科技让薄膜自己长出来!
作者: aeks | 发布时间: 2025-10-05 10:45
学科: 控制科学与工程 机械工程 材料科学与工程 计算机科学与技术
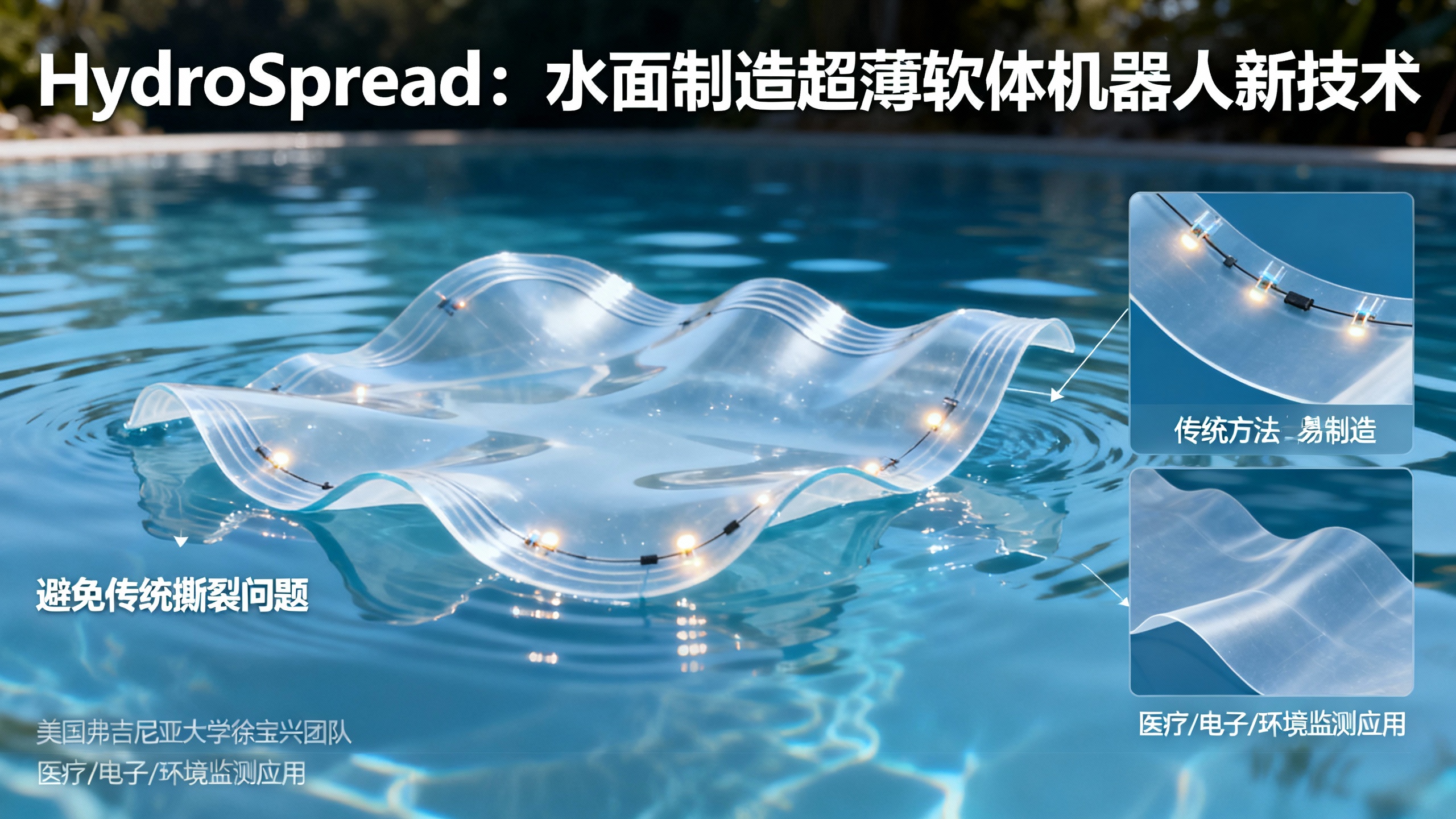
美国弗吉尼亚大学的徐宝兴教授团队开发出一种名为HydroSpread的新技术,可在水面上直接制造超薄软体机器人薄膜,避免传统方法易撕裂的问题,实现高精度、可控制的运动,有望推动医疗、电子和环境监测等领域的发展。
标签: HydroSpread 仿生设计 柔性电子 水面上制造 软体机器人