学科: 机械工程
机械工程是研究机械系统设计、制造、运行与维护的学科,涵盖力学、材料、热力学、流体力学等领域,应用数学与物理原理解决实际工程问题。其分支包括机械设计、自动化、机器人、车辆工程、航空航天等,强调创新、效率与可靠性,广泛应用于工业生产、交通运输、能源开发等行业,推动现代工程技术进步与智能化发展。(该学科下共有 202 篇文章)

机械拉力与交流电协同调控的微纳打印技术
作者: aeks | 发布时间: 2026-06-03 12:02
学科: 机械工程 材料科学与工程 电子科学与技术 计算机科学与技术
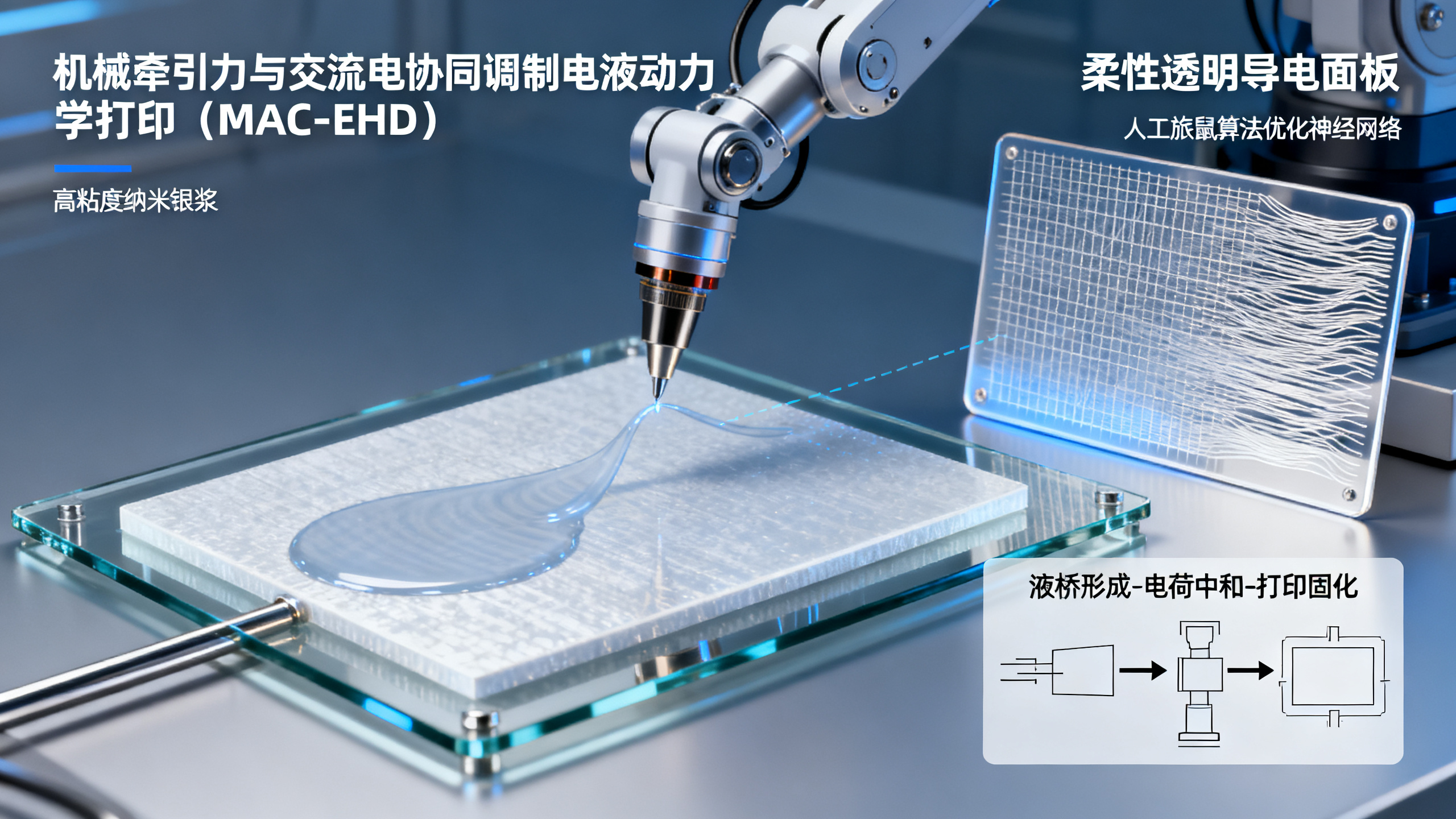
本文提出一种新型‘机械牵引力与交流电协同调制电液动力学打印’(MAC-EHD)技术,可精准地将高粘度纳米银浆印在绝缘基底(如云母)上,突破传统方法对高粘度材料的限制。该技术通过机械力与电场力协同拉伸液桥、并利用交变电场原位中和电荷,显著提升打印分辨率与稳定性。实验证明,所制柔性透明导电面板兼具高透光率、低方阻、优异弯折耐久性及高效电热转换性能。
标签: 人工旅鼠算法优化神经网络 工艺状态图 机械牵引力与交流电协同调制电液动力学打印 柔性透明导电面板 高粘度纳米银浆