学科: 机械工程
机械工程是研究机械系统设计、制造、运行与维护的学科,涵盖力学、材料、热力学、流体力学等领域,应用数学与物理原理解决实际工程问题。其分支包括机械设计、自动化、机器人、车辆工程、航空航天等,强调创新、效率与可靠性,广泛应用于工业生产、交通运输、能源开发等行业,推动现代工程技术进步与智能化发展。(该学科下共有 202 篇文章)


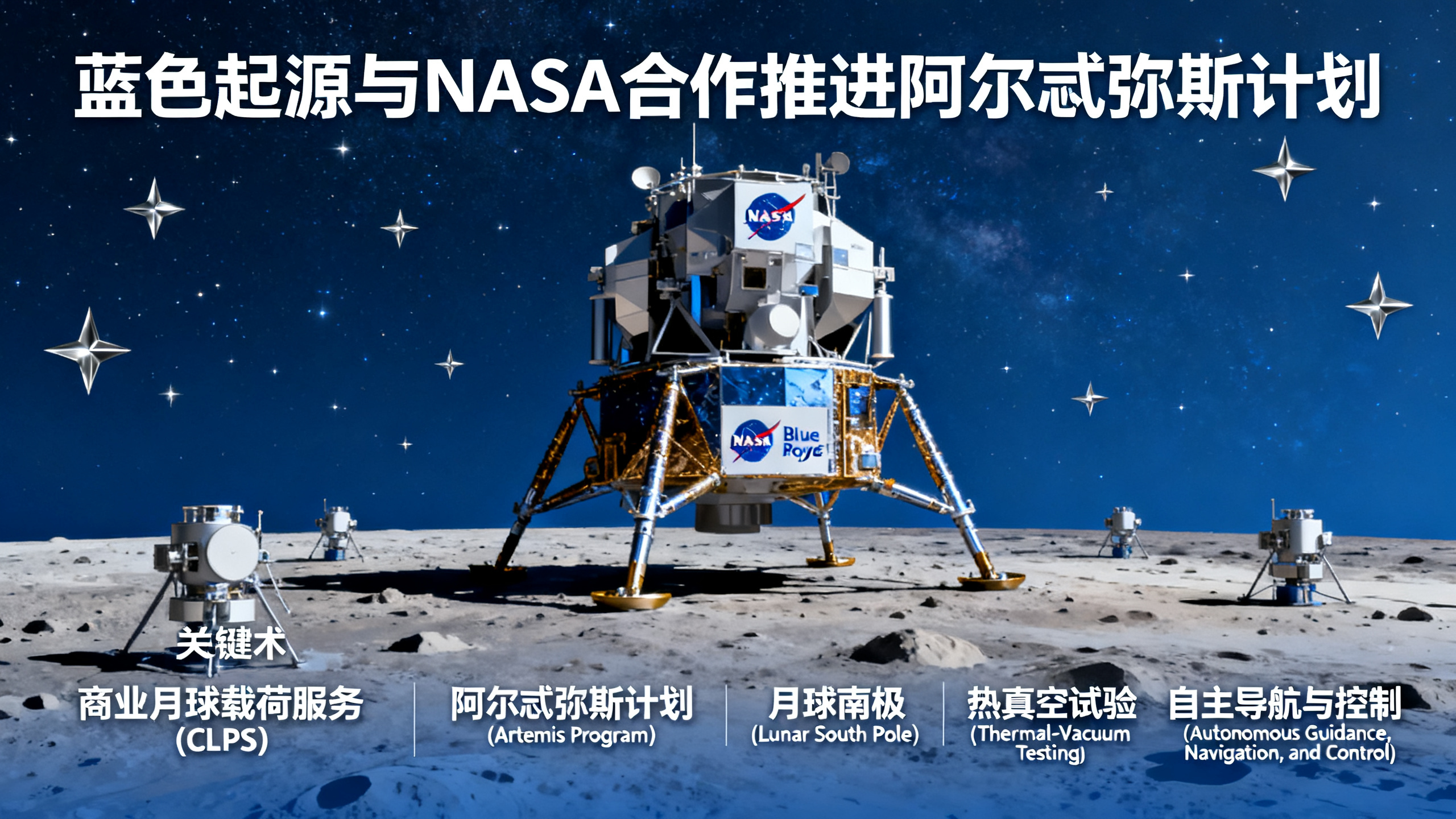
NASA成功测试新型火箭推进器,未来或助人类登陆火星
作者: aeks | 发布时间: 2026-05-08 08:01
当机器人也迎来“聊天机器人”时刻,请记住它们的机械臂
作者: aeks | 发布时间: 2026-04-29 21:02
学科: 人工智能 控制科学与工程 机械工程 计算机科学与技术
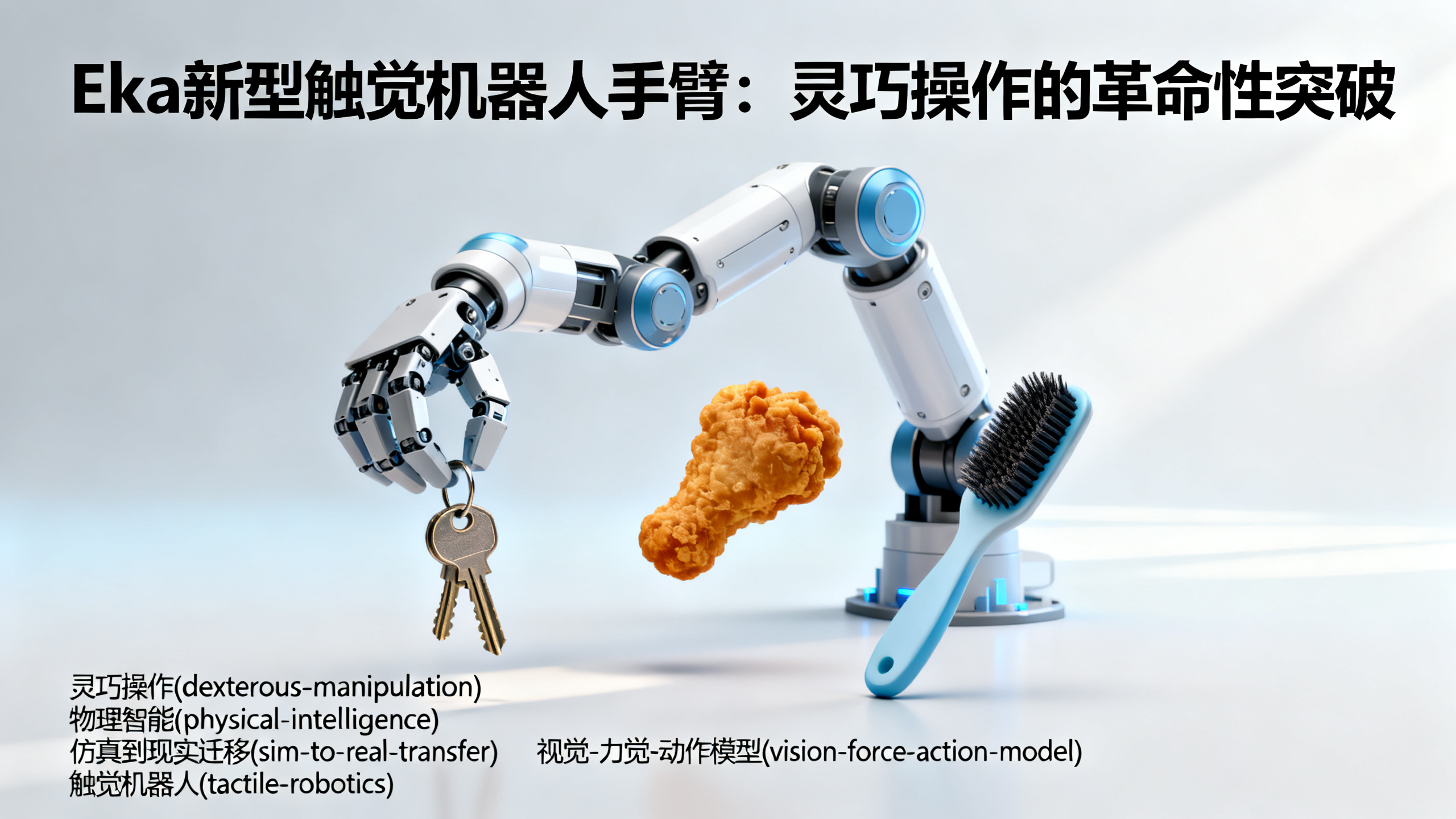
本文介绍美国初创公司Eka研发的新型机器人手臂,它能自然、灵活地抓取各种日常物品(如钥匙、发刷、鸡块),展现出接近人类的触觉与操作智能。这可能为制造业、餐饮业乃至家庭服务带来革命性突破。
标签: 仿真到现实迁移 灵巧操作 物理智能 视觉-力觉-动作模型 触觉机器人