学科: 控制科学与工程
控制科学与工程是研究系统建模、分析、控制与优化的综合性学科,涵盖自动控制理论、智能控制、系统工程、机器人技术、工业自动化等领域。它以数学、计算机和电子技术为基础,致力于解决复杂系统的稳定性、鲁棒性、自适应性等问题,广泛应用于航空航天、智能制造、能源管理、交通系统等国民经济关键领域,是现代工程技术的重要支撑学科。(该学科下共有 316 篇文章)
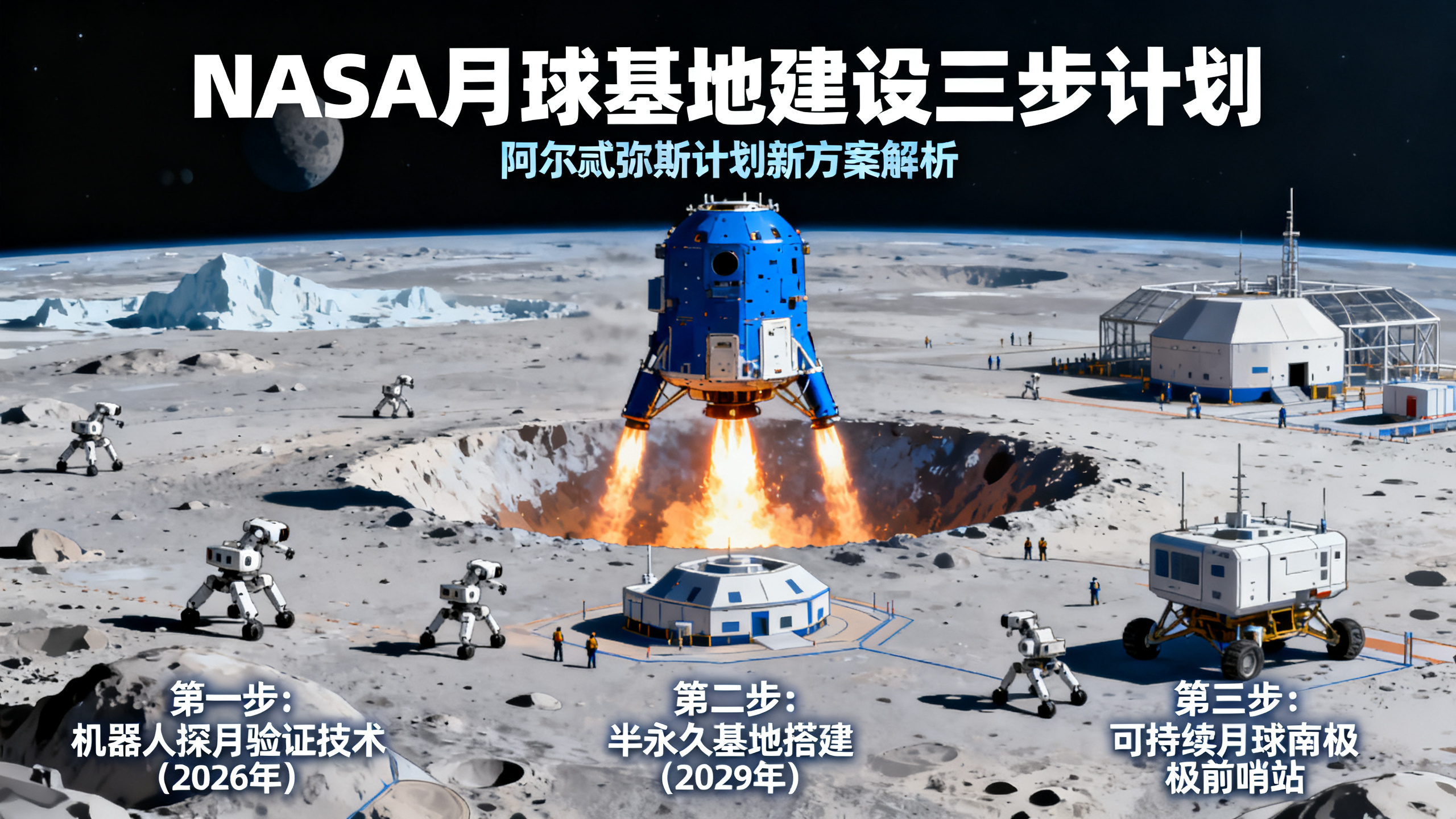
NASA公布在月球南极建基地的详细计划
作者: aeks | 发布时间: 2026-05-28 06:05
为什么没有人类参与,人工智能就做不好科学研究
作者: aeks | 发布时间: 2026-05-20 06:03
学科: 控制科学与工程 生物医学工程 管理科学与工程 计算机科学与技术
本文探讨AI如何作为‘科研协作者’加速科学发现,而非取代人类科学家。研究表明,多智能体AI系统(如Robin和Co-Scientist)能高效梳理文献、提出假说、设计实验,但全程需人类设定目标、执行关键实验、审核结果并指导方向。AI提升效率,但无法替代人类的判断力、伦理意识、失败经验与育人责任。